
Neurosky Headset:
MPU-6050:
It is the world first integrated motion tracking device which notes 6-axis motion. It has 3 axis gyroscope and 3 axis accelerometer and a DMP that is Digital Motion Processor. It’s all in small 4x4x0.9mm package. I2C bus is used as a standard bus for data transmission.
There are many breakout boards which contain MPU-6050 chip but we have GY-521.
About I2C:
This I2C bus is used by MPU6050 for communication with Arduino. The physical 12C bus has two wires that is SDA and SCL. SCL is clock line which is used to synchronize all the transferred data. SDA is the data line. These both lines are open drain drivers. And can be driven low. To make it go high just provide a pull up resistor to 5V.
These devices on I2C are masters or slaves. Master starts the clock and starts the data transfer. There are multiple slaves on this bus but it contains only one master. These both master and slave can be used for data transfer but this all transfer is only controlled by master. During the transfer of data SDA should not be changed while SCL is high. All data is transferred only in 8 bits. MSB is first.
The SCL speed is about 100 KHz.
GY-521:
This board contains a 3 axis gyroscope and a 3 axis accelerometer in a MPU-6050 chip. These are referred as an IMU that is Inertial Measurement Unit. DOF is Degree of Freedom and is referred as number of sensor inputs, so the chip with 3 axis gyroscope and 3 axis accelerometers is a 6-DOF IMU.
It contains a voltage regulator in the chip so we can apply 3.3V or 5V from arduino board. We put voltage as said above from the arduino board to GY-521 board. GND of GY-521 is connected to ground pin in arduino board. SDA pin is of data and SCL is clock. We connect A4 of arduino with SDA and A5 of arduino with SCL.

Figure3.12: Front View
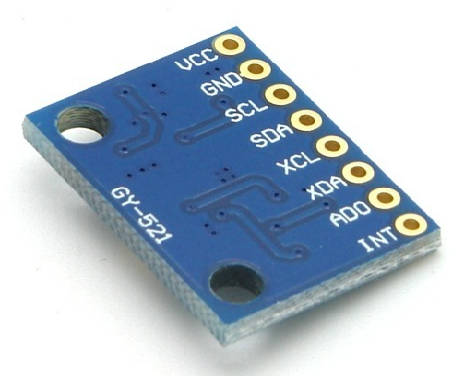
Figure3.13: Back view
Purpose of every pin:
VCC:
It is pin from where we give power to the chip.
GND:
It is ground.
SCL:
It is Clock.
SDA:
It is for data.
XCL:
XDA:
ADO:
INT:
It is pin for interrupt.
Accelerometers:
A device which used for measurement and acceleration of a moving body are vibrating body. Orientation computed from an accelerometer depends on a constant gravitational pull of 1g that is 9.8m/s^2 down in direction.
If there is no other force acting on it then the magnitude is 1g and the rotation of sensor can be computed with the position of vector of acceleration. Digital accelerometers use serial protocol like I2C, SPI or USART for giving information. Analog accelerometersgive output voltage in predefined ranges.
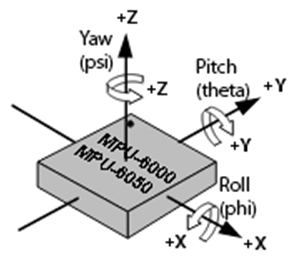
Gyroscope:
It is an instrument which measures angular velocity and not angular orientation.
Accelerometer Range:
It ranges in ±2, ±4, ±8, ±16g.
Gyroscope ranges:
It ranges in ± 250, 500, 1000, 2000 °per second.
Voltage range:
It ranges from 3.3V - 5V.










0 Comments:
Post a Comment